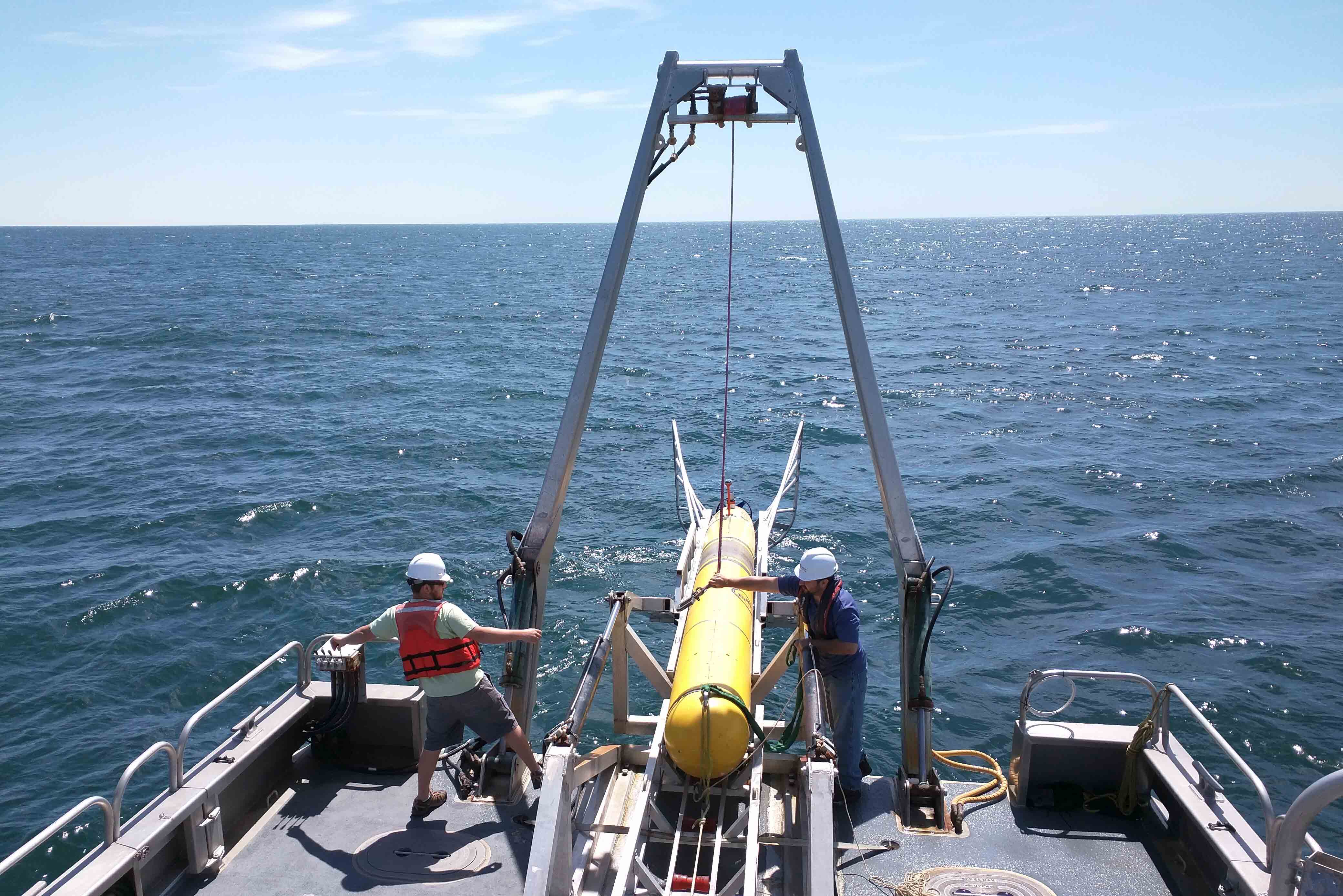
The aim of my research is to provide robots with a way to interact with their environments and generate plans to execute complex tasks. The types of robots I currently focus on are autonomous underwater vehicles (AUVs) which, due to their limited communications while underway, require robust approaches to perception and decision making. One way this can be accomplished is through combined task and motion planning which is the current focus of my research.